141B joins the talents of two
schools, Leo Elementary
and Leo Jr./Sr High creating the dynamic team of
engineers, drivers, and
researchers you see today. Our team carries a combined total of four years of VEX IQ Robotics experience
as well as three new members,
who bring fresh ideas and inspiration. We look foward to facing the challenges of this year's game and
design obstacles!
Meet Our Team
Killian Babb:
Killian is in fifth grade at Leo Elementary. He has been in the VEX Robotics Program the past three
years, beginning with Cedarville's inagrual team and now in Leo's first middle school team.
Killian
has an interest in coding and wishes to learn more about it through the robotics program.
One of the ways he has accomplished this is through learning to code this very website. Killian enjoys
writing, and has incorporated this into robotics by taking the lead on 141B's Engineering Notebook. He
is a driver on the team, working in pairs with Lauren and Aden.
He has two brothers, Vance and Marek, on Cedarville C and E teams. His parents are coaches in the
Leo/Cedarville programs.
Aden Foulk:
Aden is in sixth grade at Leo Elementary School. This is his second year in the VEX IQ Robotics Program.
Aden was an intregal part of Leo Elementary's 26194A team last year with his interest in design,
building, and coding. To learn more he has taken lead in both the autonomous and drive code. He wants to
continue to become
better at coding, get a secondary education within a coding discipline, and eventually have a career within
the coding/programming community.
Lauren Cogdell:
With this being her first year in the VEX IQ Robotics Program, Lauren has learned so many different skills.
Lauren is a sixth grader at Leo Elementary and has contributed to many different aspects of the
team's responsibilities. While Lauren has helped in building and making adjustments to the robot, she
also enjoys driving the robot at practice and in competition. She partners mostly with Killian and
enjoys
competing. Most of all, Lauren enjoys being part of the program, meeting new people and learning about the
concepts taught within the robotics program.
Nate Biddle:
Nate is a seventh Grader at Leo Jr High School. He joined robotics earlier this year, so he is fairly new to
the
VEX Robotics program. Nathan enjoys the engineering and building of the robot. He has taken the role
of
competition manager for the 141B team, and would like to work to become a driver. Nathan enjoys building legos and
playing video games in his free time. His future goal and to go into the military and get a degree in
engineering.
Grayson Givens:
Grayson Givens is in the seventh grade at Leo Junior/Senior High. Grayson has just started in the program in
2019, and is mainly focused on planning important strategies for the driver to carry out of the robot,
and building the parts of the robot. In doing this, Grayson has provided information to use for these
strategies, and built many different parts on the robot. He has taken up the role of being one of the
drivers on the team, and drives most of the time in competition season of practice.
Our Team's Robot: B-Bot
B-Bot:
To score in matches this season, you must place hollow blue and red cubes in their color coordinating
corners of the playing field (10 points),
green cubes on platforms (20 points), and orange balls on top of (two points) and inside of (one point) cubes. That is why
our robot has a cube
dragger, cube lift, a ball intake, and ball hopper to score as many points as we can.
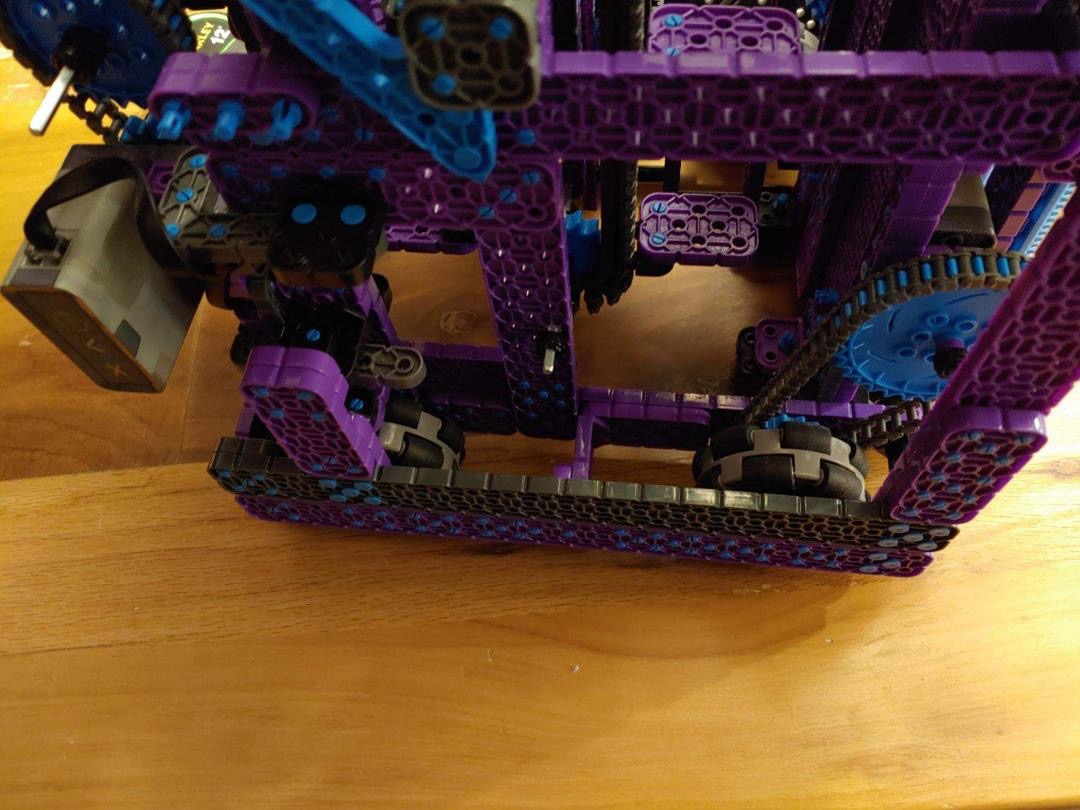
Side picture of B-Bots's wheelsThe Wheels - We have a 2:1 gear ratio on our wheels to give our robot an appropriate speed when
driving across the board. It's
two motors, one controlling each side of the wheels, are posistioned in the front of the robot behind our
cube elevator. It has four
wheels but is actually a two wheel drive, using chain to connect the motor and wheel gears. We used an
arch-like support to keep them
square with the board.
B-Bot's cube draggerThe Cube Dragger - In what doesn't appear to be the back, our cube drag is located. It is just
high
enough to grab cubes and
allow balls to flow under it. It is a 1:3 gear ratio to catch cubes relatively quickly. The motor is
attached on the right hand side.
We have a "finger-like" piece extending from the general mechanism, being the piece that grabs and
drags the
cube. It has a 1x piece extending from the back, which contacts a bumper switch when the dragger finger is
facing upward. This is to prevent the hopper bay doors from
colliding with the drag finger.
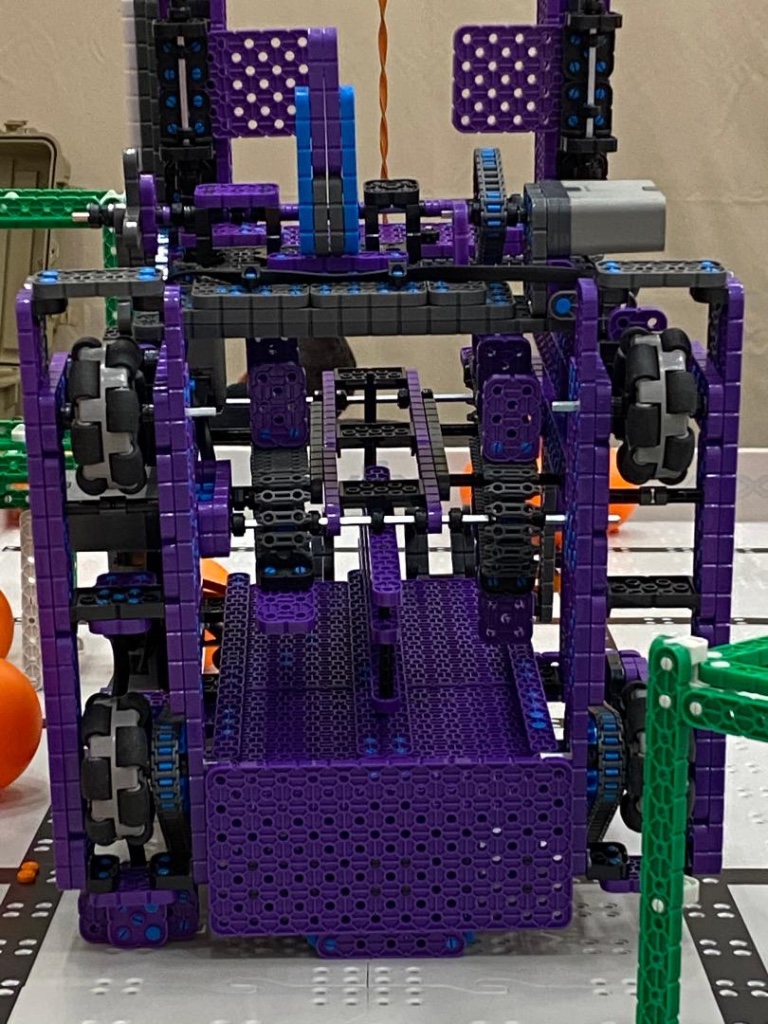
Straight on image of the cube liftThe Cube Lift - Our cube lift is located in the front of our robot. It moves up and down like a lift,
thus the name cube lift, on a ladder like piece called a rack.
The motor is attached to the mechanism itself, so it moves with the the component. The lift uses a ramp
piece as the hook to slide cubes back into a secure place. It uses a 2:1 gear ratio
to grab cubes quickly and efficiently. It uses bumper switches at the elevator top and bottom to prevent
from being raised or lowered to far.
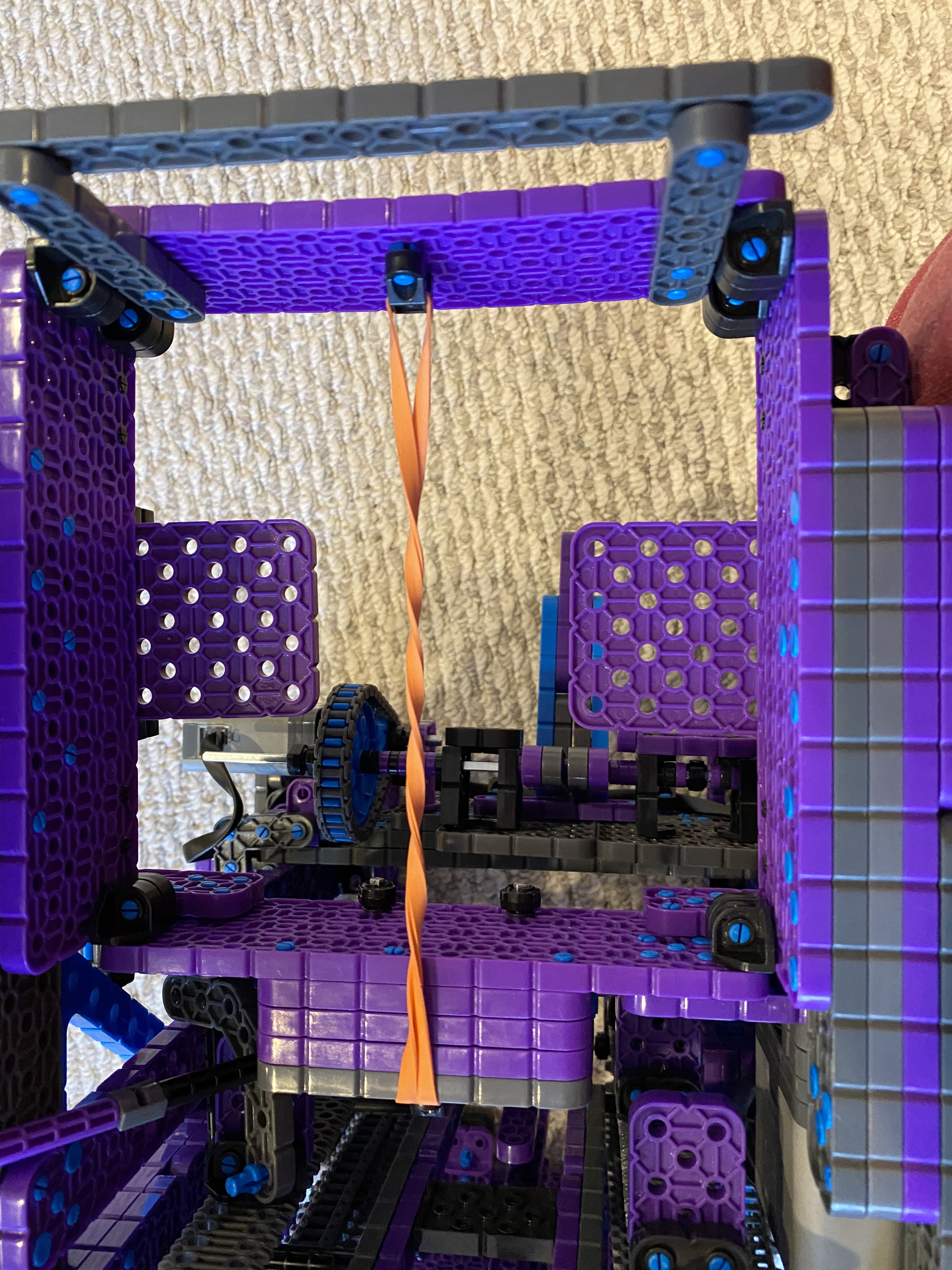
Bottom to top view of intakeThe Ball Intake - The ball intake is positioned in the very center of our robot, and balls enter it
from the back under the cube dragger. It uses a chain to rotate paddles around
which will scoop balls. Along its center, runs 1x's in conjunction with other pieces to have balls
separated into either a left or right lane. At the bottom of the intake is
the ramp, it is to help elevate balls into it so they don't become stuck. At the top is another
ramp-acting machanism, that when balls pop out the top, they guide them toward the hopper.
Overhead image of our robot's hopperThe Ball Hopper - The hopper is mounted directly above our cube dragger, and in front of our intake.
So, when balls are released from the intake they land in the hopper. The
hopper is square and just large enough to fit four balls (the same amount of spaces on the top of a cube).
It uses a system similar to a trap door to drop balls onto a cube when open,
and store them when closed.