141A | All About Team A
Team 141A
- 141A:
- 141A is focused on creating an outstanding learning environment and learning a lot about the different concepts in engineering, such as torque, gear ratios, four bars, double reverse four bars, and many more. They have also been working on expanding their knowledge across all the aspects robotics involves. Their ultimate aspiration is to make it to the World Championship in Louisville, Kentucky at the end of the season and get into the finals in Freedom Hall.
Meet the team!

- Aurora Kennedy
- Aurora is twelve years old and enjoys horse riding, robotics, and playing the violin with Killian from B Team. She has been doing robotics for four years as of the 2019-2020 season. Her favorite parts of robotics are the driving and coding aspects, although she also ends up doing a lot of building and some engineering notebook work. She has learned a lot about gear ratios, trigonometry, torque, and four bars, as well as the correct names for parts such as gussets and standoffs. She contributes a lot of time to robotics to build, code, and drive the robot. Her parents are Joseph (Joe) Kennedy and Kirin Kennedy. She has no siblings.
- Nathan Krupa
- Nathan is twelve years old, and has been doing robotics for four years. He has been interested in STEM ever since he was introduced to it. Some of his hobbies are robotics, gaming, riding his bike, and IXL, which is a math and English learning website. A-Team started working on their robot in August, and Nathan has tried to spend as much time as he could building, driving, and helping the team. He enjoys robotics because it helps him learn more about his favorite subject, math. He has three dogs, a mom named Jennifer, a dad named David, and no siblings. He is learning about gear ratios, four bars, and much more in robotics.
The Trumanator
The Wheels-
Our wheels have a 4:3 gear ratio, and a chain drive, giving us more speed. We have a bar across the back to keep both sides square, and two motors in the back of the robot behind our t-rex arms. Our omni-wheel is driven by two chain gears, and a motor which is tucked in the side of the robot.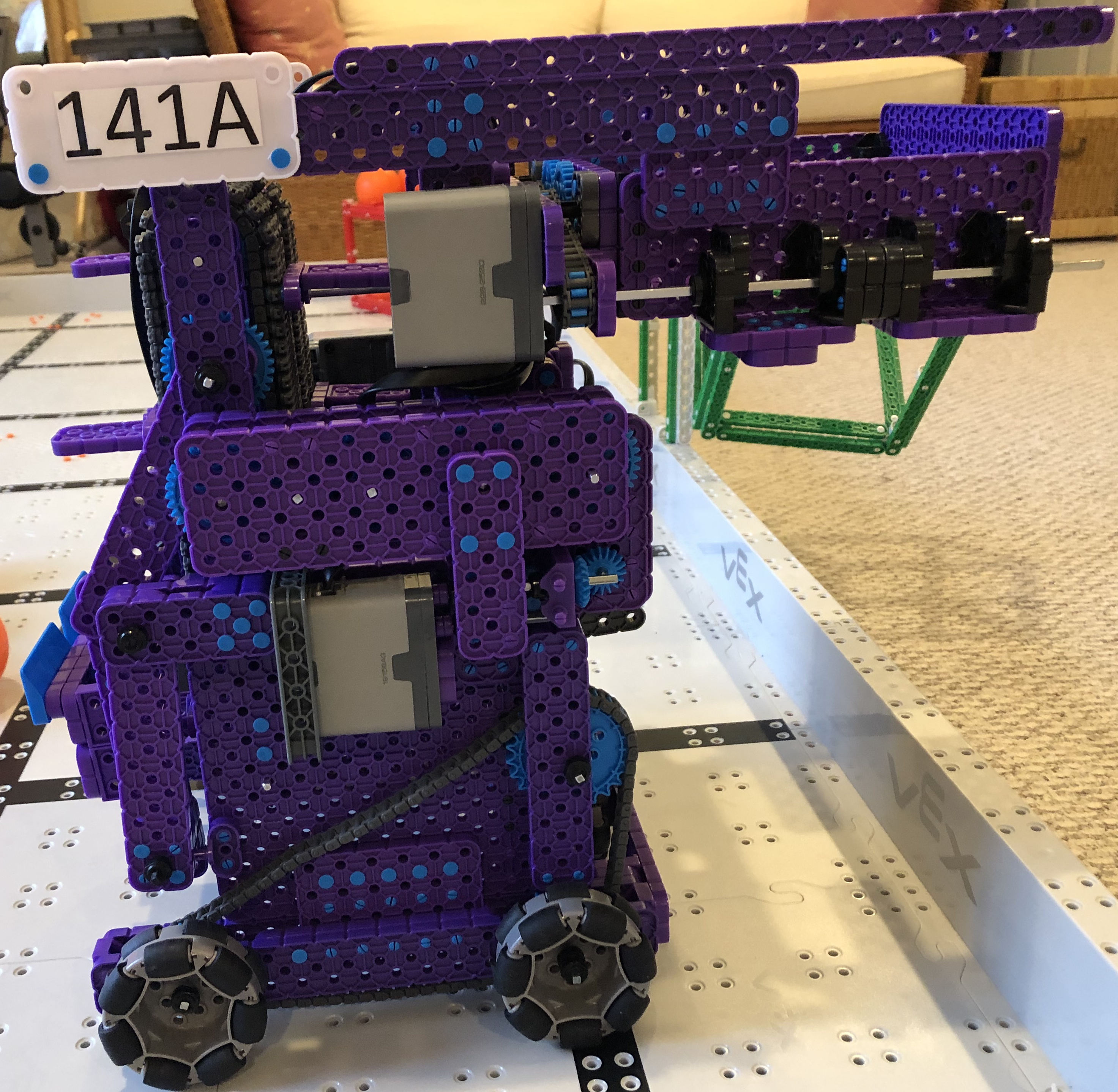
Cube Mechanisms-
We have a box arm in the front and t-rex arms in the back. They are connected using chain gears which have an 8:1 gear ratio. The box arm is a four bar with gears on the inside, allowing us to put the green cube on the high platform. To create the correct angle, we had to do trigonometry to stay in dimensions while putting the cube on top of the platform instead of simply hanging it on the side. Our t-rex arms are small hooks at the back of the robot which drag cubes so that we can take two cubes at a time across the field.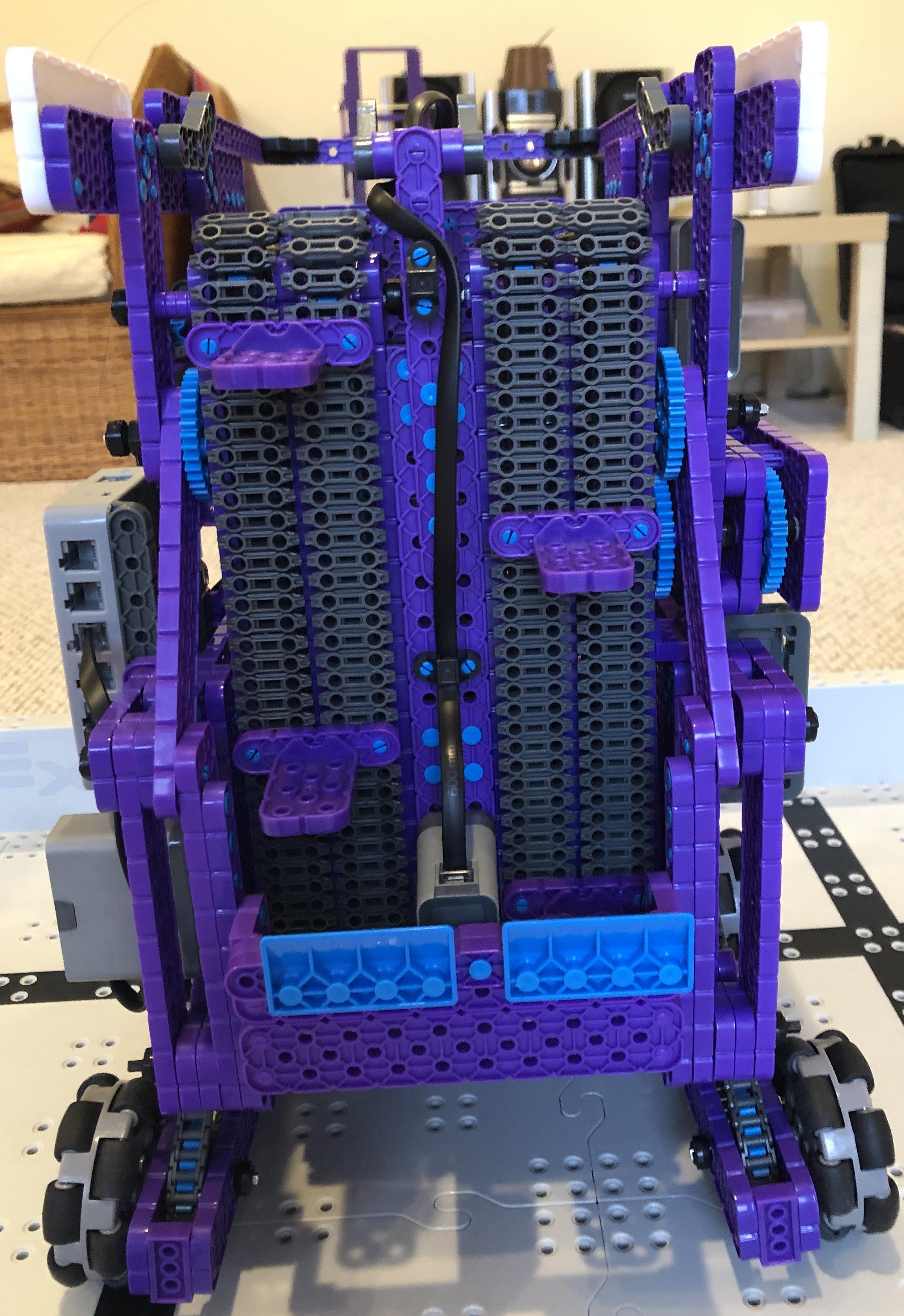
The Intake-
Our intake can lift two balls at once, as we have a double intake mechanism. We have long gussets as our padels which lift up the balls. We also have two angled pieces at the top to help the balls shoot into the hopper. The distance between panels is a little bigger than the circumference of a ball.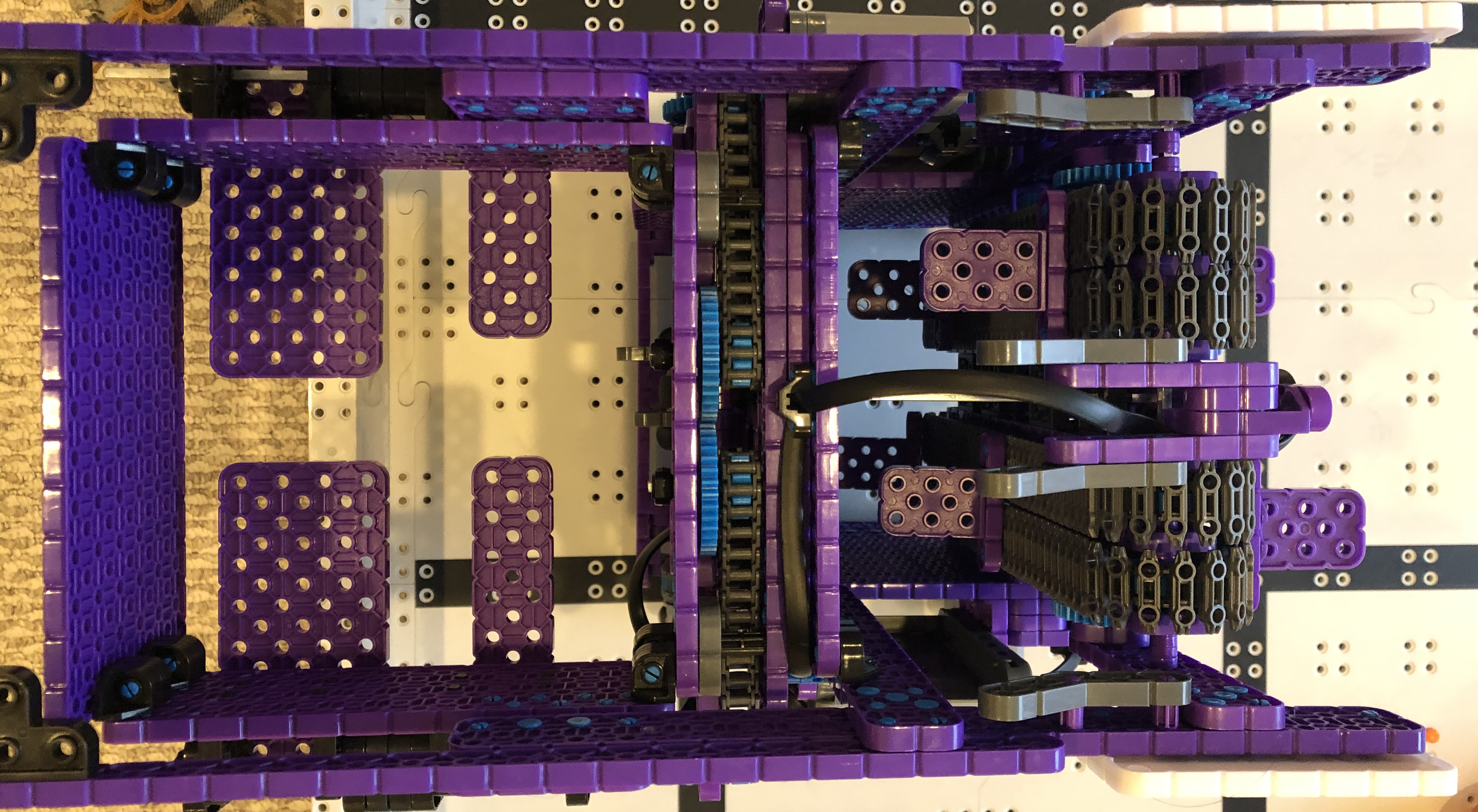
Top view of A-Team's hopper